
 Image 1 of 6
Image 1 of 6
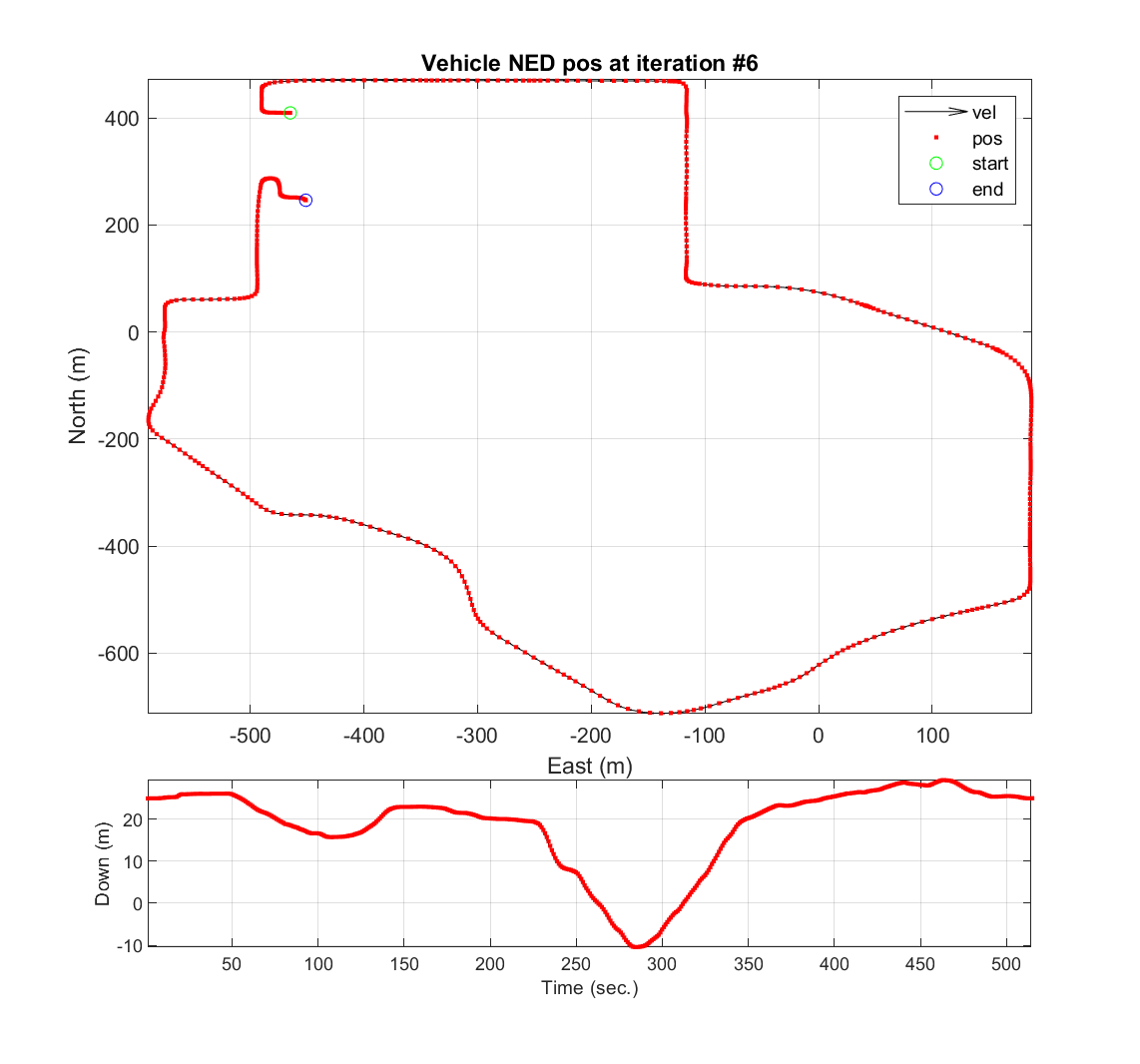 Image 2 of 6
Image 2 of 6
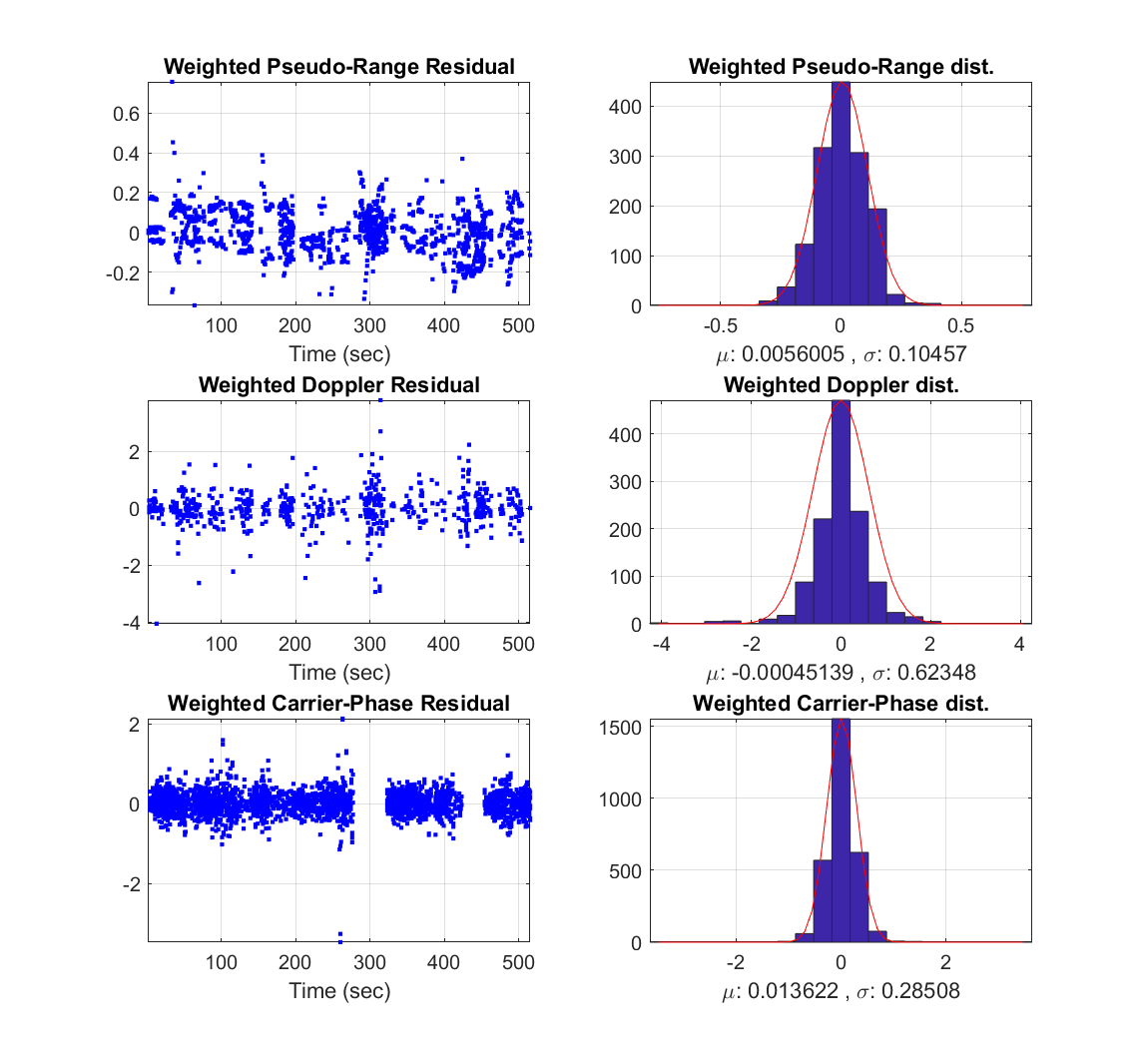 Image 3 of 6
Image 3 of 6
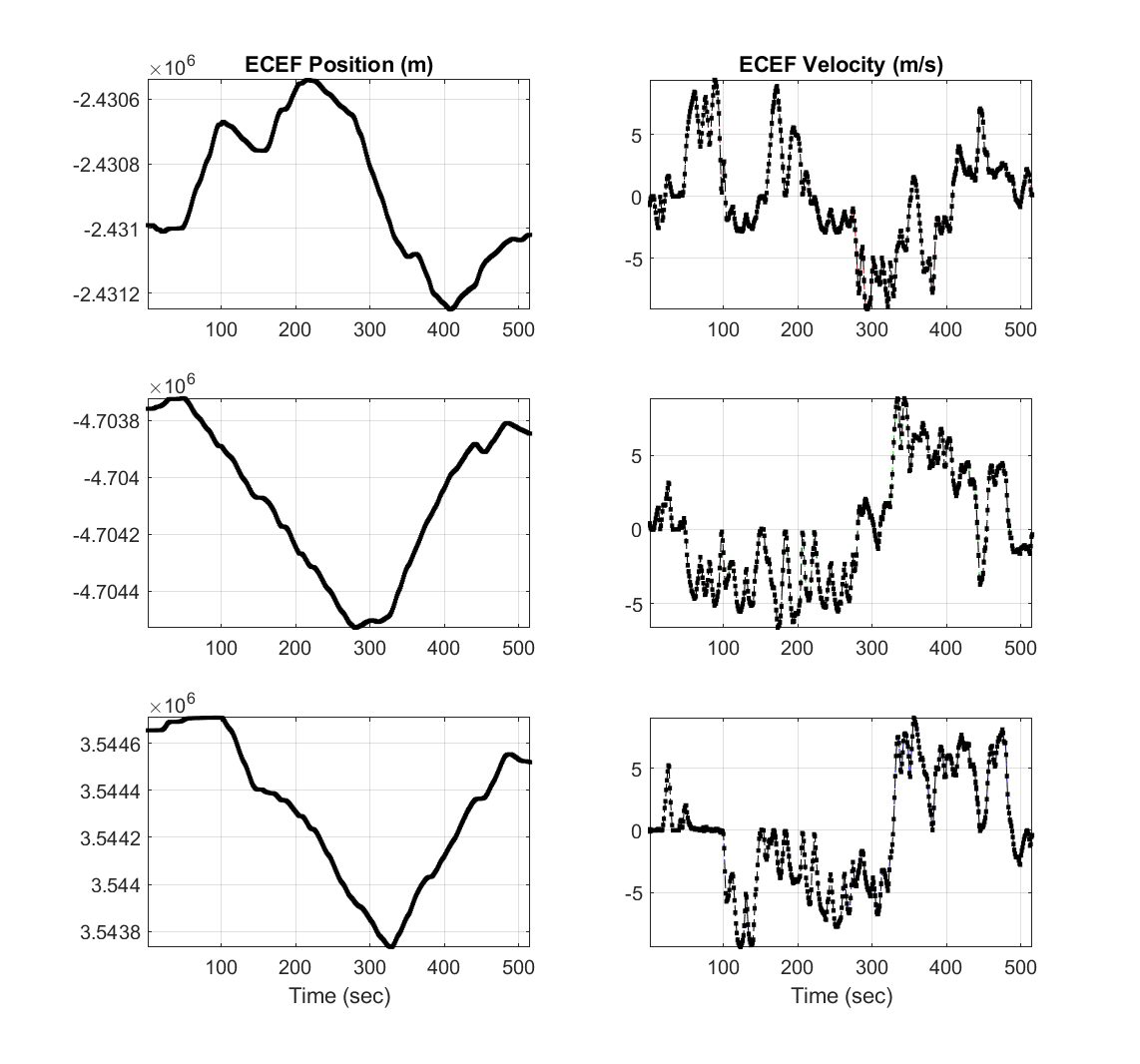 Image 4 of 6
Image 4 of 6
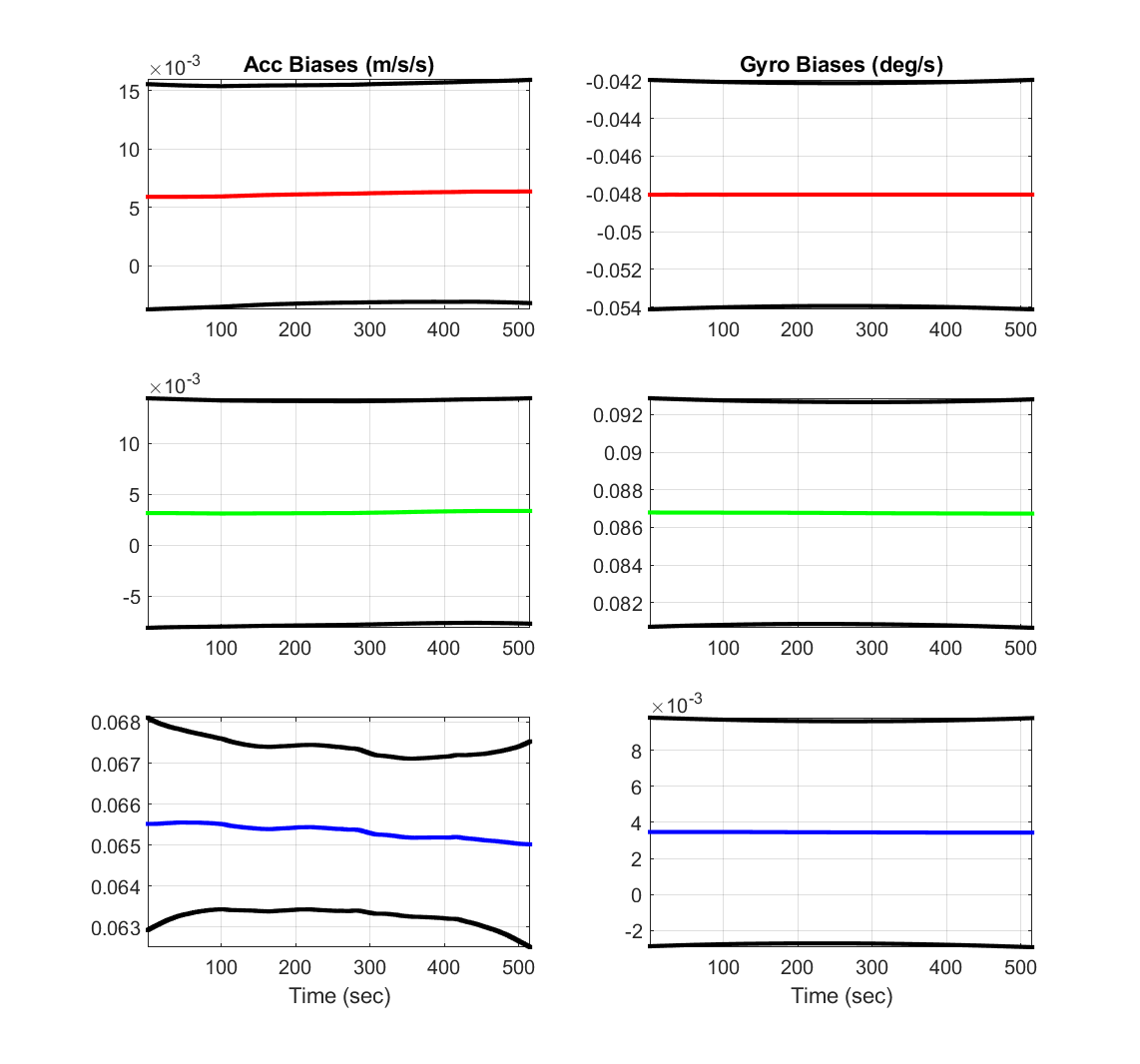 Image 5 of 6
Image 5 of 6
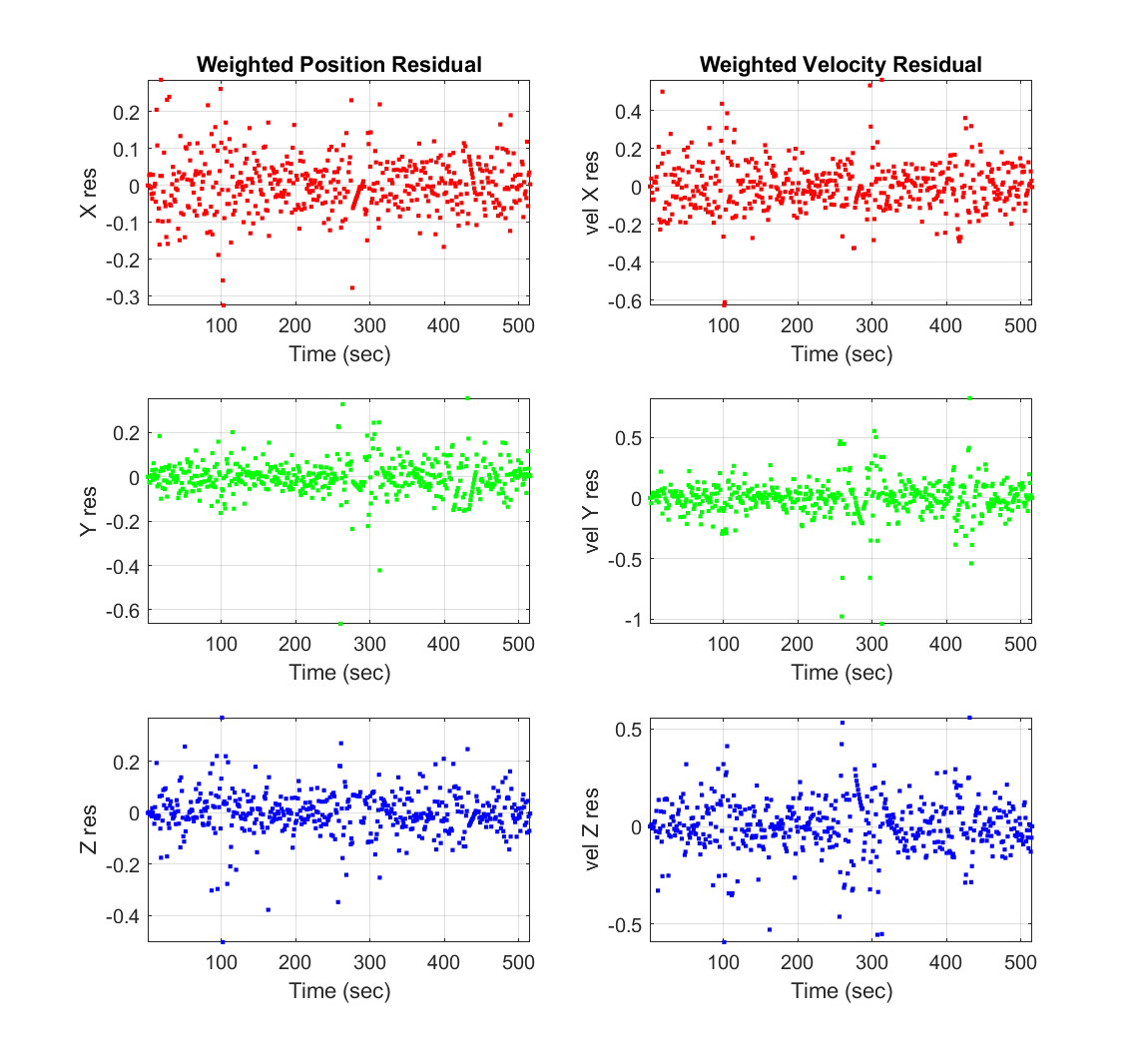 Image 6 of 6
Image 6 of 6
Roysdon Ground Truth - Trajectory Smoother
Overview
Centimeter-Level Ground Truth for Navigation, Autonomy, and Validation
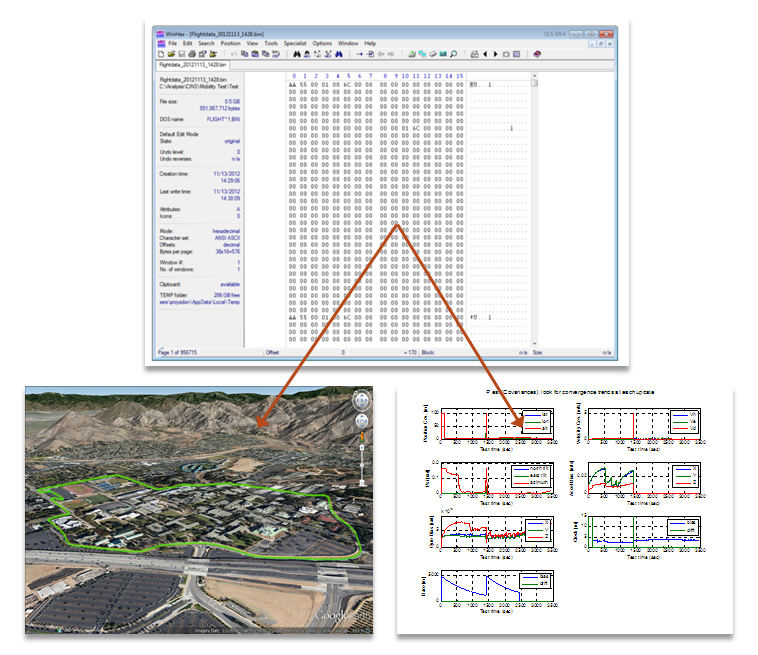
The Contemplative Real-Time (CRT) Trajectory Smoother is a state-of-the-art, full-nonlinear Bayesian estimation system designed to generate high-fidelity ground truth trajectories from IMU and GPS data.
Unlike forward-only filters, this system performs global trajectory smoothing, incorporating information from the entire dataset to recover the most probable motion history — including carrier-phase integer ambiguity resolution using the MILES method. The result is centimeter-level accuracy suitable for validation, benchmarking, and scientific ground truth. This toolbox is the reference truth engine behind advanced navigation, estimation, and autonomy research.
Visit this page for more details.
What It Does
The CRT Trajectory Smoother:
Ingests raw IMU and GPS measurements
Performs full-nonlinear optimal Bayesian estimation
Solves GPS carrier-phase integer ambiguity
Produces ground-truth position, velocity, and attitude
Outputs results in NED and ECEF
Provides both low-rate (GPS) and high-rate (IMU) solutions
The system is designed for post-processing of:
Recorded real-world flight/vehicle data
Synthetic datasets (e.g., from the Roysdon Signal Generator)
Why CRT Is Different
This is not a filter — it is a smoother
Real-time filters (EKF, UKF) are constrained by causality. CRT removes that constraint. By operating as a trajectory smoother, CRT:
Uses future and past measurements simultaneously
Corrects accumulated drift and bias
Produces globally consistent trajectories
Achieves accuracy unattainable with forward-only estimators
Integer ambiguity solved, not assumed
Carrier-phase GPS only delivers centimeter accuracy if integer ambiguities are correctly resolved. CRT:
Explicitly solves integer ambiguities
Uses the MILES method for robust resolution
Produces true carrier-phase ground truth, not float approximations
Estimation Architecture
State Vector
Position
Velocity
Attitude
Gyroscope bias
Accelerometer bias
Reference Frames
NED
ECEF
Rates
High-rate (IMU)
Low-rate (GPS)
The architecture is sensor-agnostic and easily extensible to:
Magnetometers
Barometers
Additional aiding sources
Industry-Verified Accuracy
The Trajectory Smoother outputs were directly verified against commercial off-the-shelf ground truth generators, using identical trajectories and configurations.
This verification ensures:
Sensor statistics match industry reference tools
Error growth and dynamics behave correctly
Generated data is suitable for algorithm validation, not just visualization
This makes the toolbox appropriate for aerospace, autonomy, defense, and research programs where credibility matters.
Designed for Engineers
Simple Operation
One-click execution via MAIN_*.m
Centralized configuration through CONFIG_*.m
Sensible defaults for immediate use
Fully transparent MATLAB implementation
Extensible Architecture
Clean variable naming consistent with academic and industry literature
Clear reference-frame conventions (ECEF, NED, ECI)
Output & Results
The Trajectory Smoother automatically:
Calculates trajectories
Runs all enabled sensor models
Plots results
Saves all outputs (.mat, .fig, .jpg, .doc) to a structured data directory
Typical Use Cases
Ground truth generation for navigation and autonomy
Validation of EKF / UKF / factor-graph estimators
Benchmarking GNSS/INS performance
Monte-Carlo evaluation
Flight-test and vehicle-test truth recovery
Scientific publications requiring defensible truth
Sensor error and bias characterization
This tool answers the question: “What actually happened?”
Why This Tool Exists
Most teams either:
Rely on expensive black box tools, or
Build ad-hoc simulators that lack realism and validation
The Roysdon Nav Signal Generator fills the gap:
Software-defined
Physically accurate
Industry-verified
Fully inspectable and extensible
It gives engineers control, credibility, and confidence.
Key Advantage
Roysdon LLC delivers production-grade aerospace, navigation, and AI toolchains that collapse years of R&D into immediately deployable engineering systems.
Unlike academic frameworks or vendor-locked platforms, these toolboxes are:
Built from real aircraft, navigation, and embedded deployments
Fully inspectable and extensible
Designed for mission-critical environments
This software directly replaces:
Fragmented internal toolchains
Years of bespoke estimator and simulator development
Vendor-locked black-box solutions
Competitive Advantage
End-to-end coverage: theory → simulation → real-time systems
Proven mathematical rigor
Field-tested architectures
No dependency on proprietary runtimes
Suitable for air-gapped and classified environments
Pricing Tiers
Email roysdonfibonaccipress@gmail.com for purchase.
Individual License: $10,000 (one-time)
For independent engineers, researchers, and educators
Full access to selected toolboxes
Non-commercial use
Local execution only
Source access for learning and experimentation
Limited email & phone support (additional training fees can be negotiated).
Restrictions
No resale, redistribution, or commercial deployment
No SaaS, hosted services, or client deliverables
Typical Buyers
PhD students, faculty
Independent aerospace / robotics engineers
Advanced hobbyists and educators
Startup License: $10,000 (annual)
For early-stage companies and small teams
Full toolbox access
Commercial use permitted
Internal product development allowed
Up to a fixed number of engineers (e.g., 5–15 seats)
Limited email & phone support (additional training fees can be negotiated).
Restrictions
No sublicensing
No resale as a standalone product
Revenue cap (e.g., <$10M ARR)
Typical Buyers
UAV startups
Robotics companies
Autonomy, GNSS, and aerospace software ventures
Enterprise License: $25,000 (annual)
For large commercial organizations
Unlimited internal use
Multi-team and multi-program deployment
Commercial products and services permitted
Optional source escrow
SLA-backed support and onboarding
Optional customization and integration support
Email & phone support (additional training fees can be negotiated).
Optional Add-Ons
Internal training
Feature extensions
Long-term maintenance agreements
Typical Buyers
Aerospace primes
Automotive autonomy divisions
Telecom, robotics, and advanced analytics firms
Government / Defense License $25,000 (annual)
For U.S. Government, FFRDCs, and defense contractors
Unlimited programmatic use
Air-gapped and classified-environment compatible
Program-specific licensing
Long-term sustainment options
Compliance-friendly terms (FAR / DFARS-compatible by request)
Email & phone support (additional training fees can be negotiated).
Optional Add-Ons
Mission-specific extensions
Verification & validation support
Documentation packages for accreditation
Long-term maintenance agreements
Typical Buyers
DoD programs
National labs
Intelligence and research agencies
Licensing
See License terms here.
Overview
Centimeter-Level Ground Truth for Navigation, Autonomy, and Validation
The Contemplative Real-Time (CRT) Trajectory Smoother is a state-of-the-art, full-nonlinear Bayesian estimation system designed to generate high-fidelity ground truth trajectories from IMU and GPS data.
Unlike forward-only filters, this system performs global trajectory smoothing, incorporating information from the entire dataset to recover the most probable motion history — including carrier-phase integer ambiguity resolution using the MILES method. The result is centimeter-level accuracy suitable for validation, benchmarking, and scientific ground truth. This toolbox is the reference truth engine behind advanced navigation, estimation, and autonomy research.
Visit this page for more details.
What It Does
The CRT Trajectory Smoother:
Ingests raw IMU and GPS measurements
Performs full-nonlinear optimal Bayesian estimation
Solves GPS carrier-phase integer ambiguity
Produces ground-truth position, velocity, and attitude
Outputs results in NED and ECEF
Provides both low-rate (GPS) and high-rate (IMU) solutions
The system is designed for post-processing of:
Recorded real-world flight/vehicle data
Synthetic datasets (e.g., from the Roysdon Signal Generator)
Why CRT Is Different
This is not a filter — it is a smoother
Real-time filters (EKF, UKF) are constrained by causality. CRT removes that constraint. By operating as a trajectory smoother, CRT:
Uses future and past measurements simultaneously
Corrects accumulated drift and bias
Produces globally consistent trajectories
Achieves accuracy unattainable with forward-only estimators
Integer ambiguity solved, not assumed
Carrier-phase GPS only delivers centimeter accuracy if integer ambiguities are correctly resolved. CRT:
Explicitly solves integer ambiguities
Uses the MILES method for robust resolution
Produces true carrier-phase ground truth, not float approximations
Estimation Architecture
State Vector
Position
Velocity
Attitude
Gyroscope bias
Accelerometer bias
Reference Frames
NED
ECEF
Rates
High-rate (IMU)
Low-rate (GPS)
The architecture is sensor-agnostic and easily extensible to:
Magnetometers
Barometers
Additional aiding sources
Industry-Verified Accuracy
The Trajectory Smoother outputs were directly verified against commercial off-the-shelf ground truth generators, using identical trajectories and configurations.
This verification ensures:
Sensor statistics match industry reference tools
Error growth and dynamics behave correctly
Generated data is suitable for algorithm validation, not just visualization
This makes the toolbox appropriate for aerospace, autonomy, defense, and research programs where credibility matters.
Designed for Engineers
Simple Operation
One-click execution via MAIN_*.m
Centralized configuration through CONFIG_*.m
Sensible defaults for immediate use
Fully transparent MATLAB implementation
Extensible Architecture
Clean variable naming consistent with academic and industry literature
Clear reference-frame conventions (ECEF, NED, ECI)
Output & Results
The Trajectory Smoother automatically:
Calculates trajectories
Runs all enabled sensor models
Plots results
Saves all outputs (.mat, .fig, .jpg, .doc) to a structured data directory
Typical Use Cases
Ground truth generation for navigation and autonomy
Validation of EKF / UKF / factor-graph estimators
Benchmarking GNSS/INS performance
Monte-Carlo evaluation
Flight-test and vehicle-test truth recovery
Scientific publications requiring defensible truth
Sensor error and bias characterization
This tool answers the question: “What actually happened?”
Why This Tool Exists
Most teams either:
Rely on expensive black box tools, or
Build ad-hoc simulators that lack realism and validation
The Roysdon Nav Signal Generator fills the gap:
Software-defined
Physically accurate
Industry-verified
Fully inspectable and extensible
It gives engineers control, credibility, and confidence.
Key Advantage
Roysdon LLC delivers production-grade aerospace, navigation, and AI toolchains that collapse years of R&D into immediately deployable engineering systems.
Unlike academic frameworks or vendor-locked platforms, these toolboxes are:
Built from real aircraft, navigation, and embedded deployments
Fully inspectable and extensible
Designed for mission-critical environments
This software directly replaces:
Fragmented internal toolchains
Years of bespoke estimator and simulator development
Vendor-locked black-box solutions
Competitive Advantage
End-to-end coverage: theory → simulation → real-time systems
Proven mathematical rigor
Field-tested architectures
No dependency on proprietary runtimes
Suitable for air-gapped and classified environments
Pricing Tiers
Email roysdonfibonaccipress@gmail.com for purchase.
Individual License: $10,000 (one-time)
For independent engineers, researchers, and educators
Full access to selected toolboxes
Non-commercial use
Local execution only
Source access for learning and experimentation
Limited email & phone support (additional training fees can be negotiated).
Restrictions
No resale, redistribution, or commercial deployment
No SaaS, hosted services, or client deliverables
Typical Buyers
PhD students, faculty
Independent aerospace / robotics engineers
Advanced hobbyists and educators
Startup License: $10,000 (annual)
For early-stage companies and small teams
Full toolbox access
Commercial use permitted
Internal product development allowed
Up to a fixed number of engineers (e.g., 5–15 seats)
Limited email & phone support (additional training fees can be negotiated).
Restrictions
No sublicensing
No resale as a standalone product
Revenue cap (e.g., <$10M ARR)
Typical Buyers
UAV startups
Robotics companies
Autonomy, GNSS, and aerospace software ventures
Enterprise License: $25,000 (annual)
For large commercial organizations
Unlimited internal use
Multi-team and multi-program deployment
Commercial products and services permitted
Optional source escrow
SLA-backed support and onboarding
Optional customization and integration support
Email & phone support (additional training fees can be negotiated).
Optional Add-Ons
Internal training
Feature extensions
Long-term maintenance agreements
Typical Buyers
Aerospace primes
Automotive autonomy divisions
Telecom, robotics, and advanced analytics firms
Government / Defense License $25,000 (annual)
For U.S. Government, FFRDCs, and defense contractors
Unlimited programmatic use
Air-gapped and classified-environment compatible
Program-specific licensing
Long-term sustainment options
Compliance-friendly terms (FAR / DFARS-compatible by request)
Email & phone support (additional training fees can be negotiated).
Optional Add-Ons
Mission-specific extensions
Verification & validation support
Documentation packages for accreditation
Long-term maintenance agreements
Typical Buyers
DoD programs
National labs
Intelligence and research agencies
Licensing
See License terms here.